Semantic Reasoning Tutorial
This tutorial demonstrates how the semantic reasoning module developed in CONVINCE can identify undesired situations at runtime.
All commands use docker compose and must be executed from the root of the repository, where docker-compose.yml is located.
A video of this tutorial is available on YouTube.
The Problem
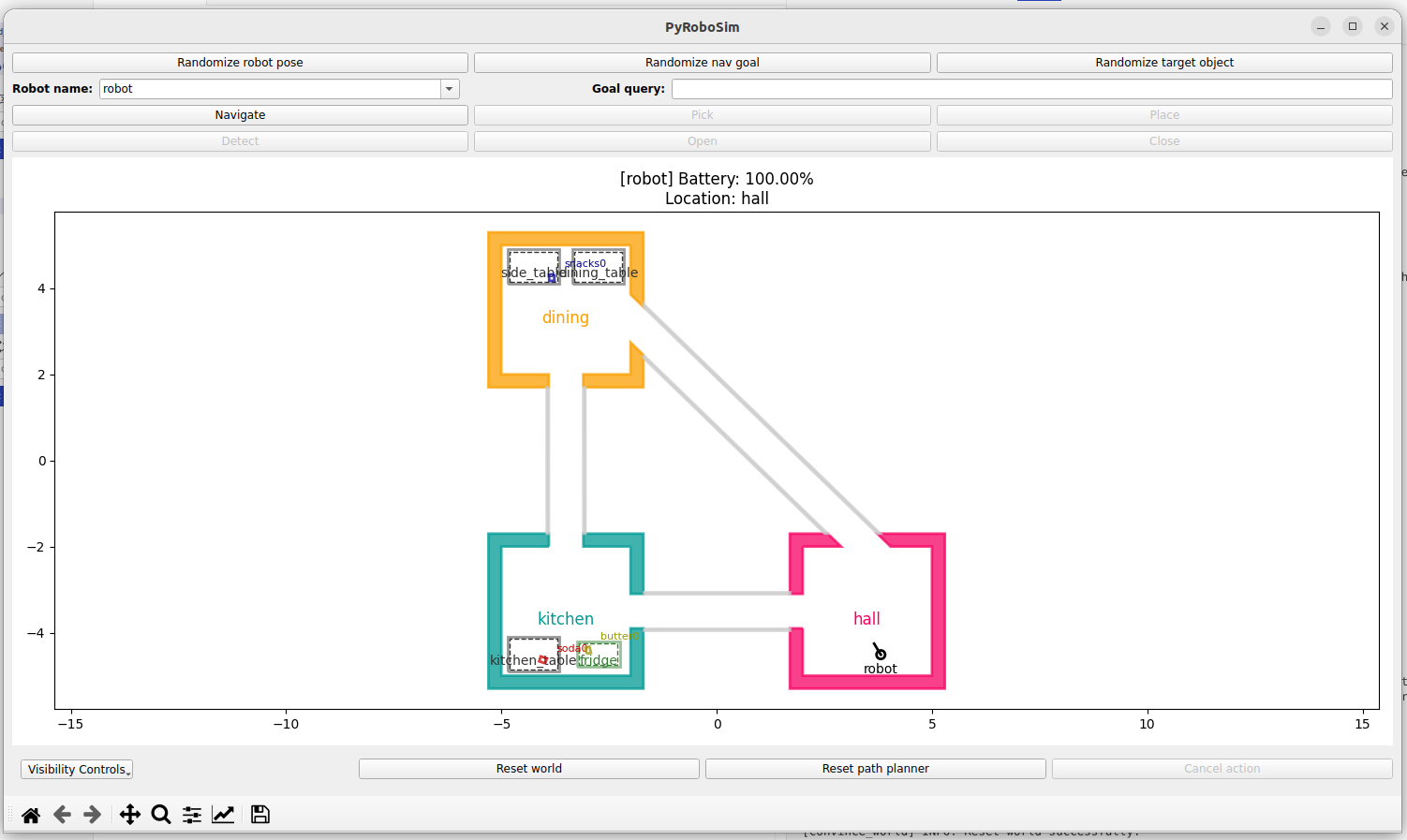
The robot is tasked with navigating a domestic environment to fetch soda and snacks, delivering them to the fridge one at a time.
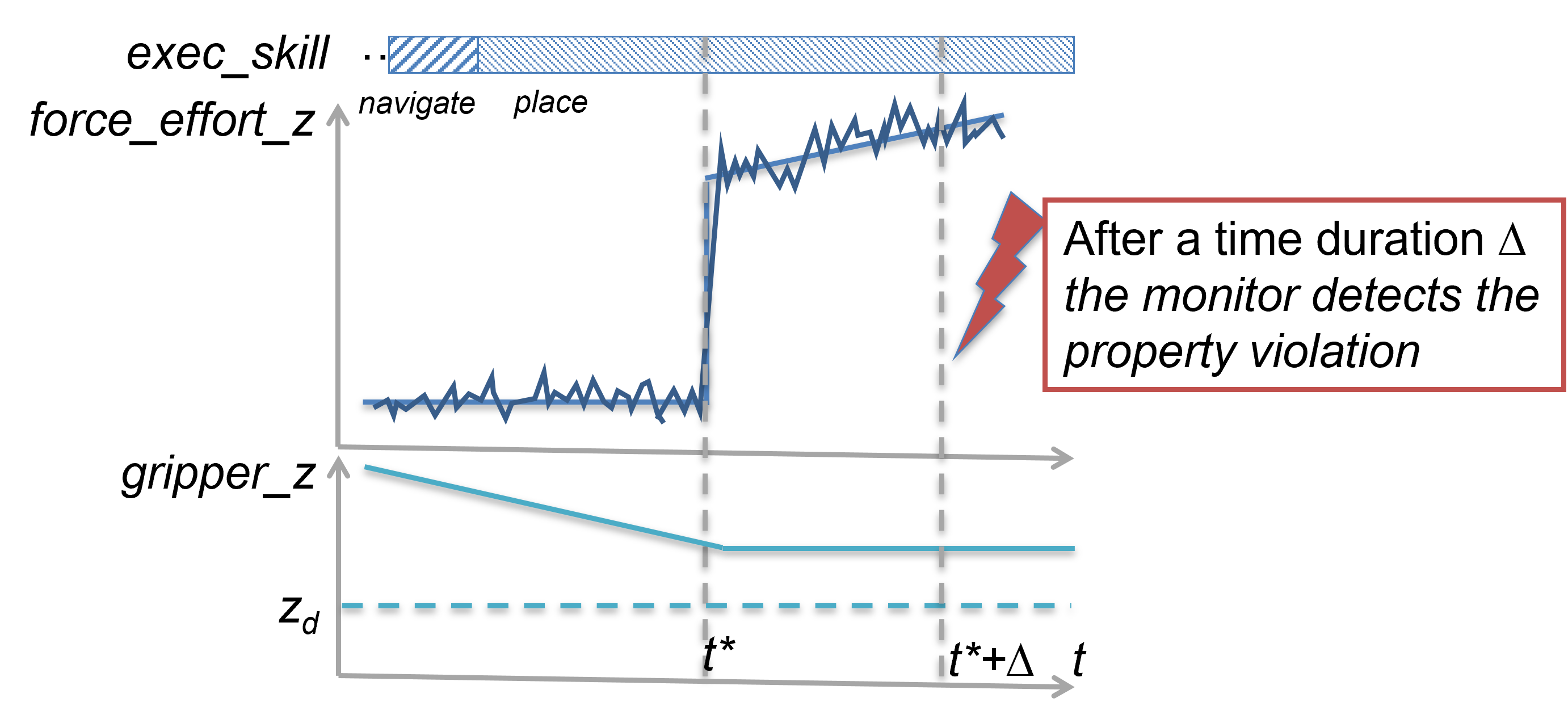
During the execution of a place action, the force measured at the robot’s end effector unexpectedly rises, while the gripper’s z-position does not decrease to reach the desired place target.
This unexpected situation represents an undesired deviation from nominal operational conditions. It can be formally described as a property in temporal logics, allowing monitoring frameworks like MOON to detect when it is violated.
Though, detection alone is insufficient to determine the appropriate intervention. Rising force at the end-effector’s tip can be due to multiple causes, such as collisions with objects making the place target inaccessible or adversarial human behavior obstructing the robot arm from reaching the target place.
Identifying the semantic nature of the anomaly is then crucial to apply informed intervention.
Getting Started
Run this command to bring up all the system’s components:
docker compose run --rm base ros2 launch semantic_reasoning_bringup bringup.launch.py
System’s components include:
/demo. An instance of PyRoboSim providing the virtual domestic environment for the robot to navigate./plotjuggler. An instance of PlotJuggler that displays the values of a simple virtual force sensor at the tip of the robot’s end-effector./tutorial_skill_executor. A simple skill execution layer for the mobile robot. Skills are implemented by action servers that use the same interfaces as the offline verified models. The actual skill implementation is delegated to PyRoboSim. The component also provides a publisher for the name of the last executed skill and a service server for artificially injecting bugs in the robot’s navigation system to force the occurrence of anomalies./monitor. An instance of a MOON monitor for the place action, configured (seemisc/moondirectory) to verify this property at runtime: when executingPLACE, the effort shall not exceed 4.5N for more than 200ms.PROPERTY = "( {PLACE} -> ( once[0:0.2]( {effort <= 4.5} ) ) )"
Components related to semantic reasoning (see below).
Semantic Reasoning Components
Semantic reasoning components include:
/anchoring_process. The component that integrates perception data with information in digital twins to produce a symbolic representation of operational environment. The inference mechanism at its core is enabled by a knowledge base constituted by an ontology, SKRAWL, and its rules./anchoring_processis configured with a scene description in JSON format that maps entities in the digital twins to concepts in the SKRAWL ontology (seemisc/anchoring/dt/setup.json). Information on functional entities comes from/tutorial_skill_executor, while that on geometric entities comes from/tutorial_dt./tutorial_dt. The digital twin that provides geometric information of scene objects to/anchoring_process. This includes objects’ bounding boxes and and runtime-changing data such as positions and orientations./tutorial_dtuses PyRoboSim’s/request_world_stateservice to access geometric information in the virtual scene and then packs it in JSON format for/anchoring_processto consume./monitors_anchoring_interface. A component that listens to MOON monitors’ verdict topics (/place_monitor/monitor_verdictin this example) and triggers the execution of the anchoring’s knowledge update process when the violation of a monitored property is detected.An instance of TypeDB Studio, to visually inspect the robot’s internal knowledge (SKRAWL). To set up TypeDB Studio, (i) connect to the running TypeDB server (click
Connect to TypeDBon the top right, thenConnect); (ii) select the available database (convince-semantic_reasoning_demo) from the drop-down menu on the top left; and (iii) click onOpen Project, thenOpento access to ready-to-use queries for knowledge inspection.
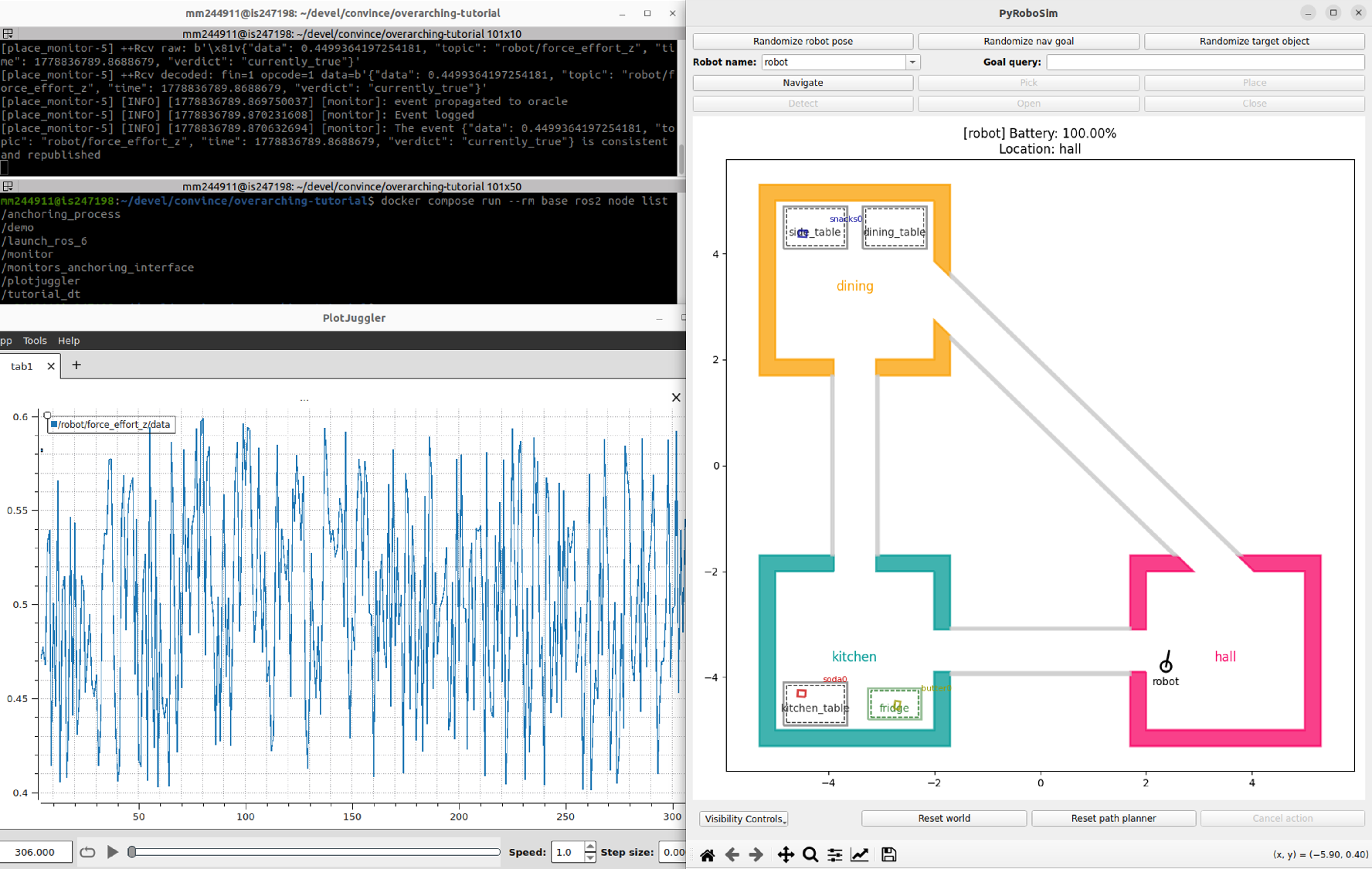
Nominal Execution
At the beginning, the robot operates without encountering any deviations from the planned mission. It successfully retrieves the soda and transports it to the fridge. Then it navigates seamlessly to the dining’s side table and picks up the snacks.
To execute this initial phase of the mission, where everything proceeds as expected, run:
docker compose run --rm base ros2 launch semantic_reasoning_bringup policy_executor.launch.py target_tree:=SRBT1
The robot starts moving and logs of the BT status are printed in the console.
The behavior tree of this first part of the mission is simulation_extras/bt_executor2/behavior_trees/bt_tree_1.xml. Note, we assume full observability of objects, i.e., the robot does not need to use any object detector to find soda and snacks and add them to the world model.
Anomaly Injection
At this stage, our demo scenario anticipates that the robot drifts during the execution of the next navigation action, causing it to end up at the corner of the fridge rather than in front of it. We simulate this drift by introducing a spurious navigation bug before the navigation action is executed using the following command:
docker compose run --rm base ros2 service call /robot/inject/spurious_navigation_bug std_srvs/srv/SetBool "{data: true}"
Additionally, we assume that the condition check programmed by the developers, which is intended to ensure that the robot has actually reached the target point, is incorrectly implemented. Consequently, the misplacement goes undetected. As a result, when the robot attempts to place the snacks in the fridge, it collides with the fridge’s borders, causing the place action to fail.
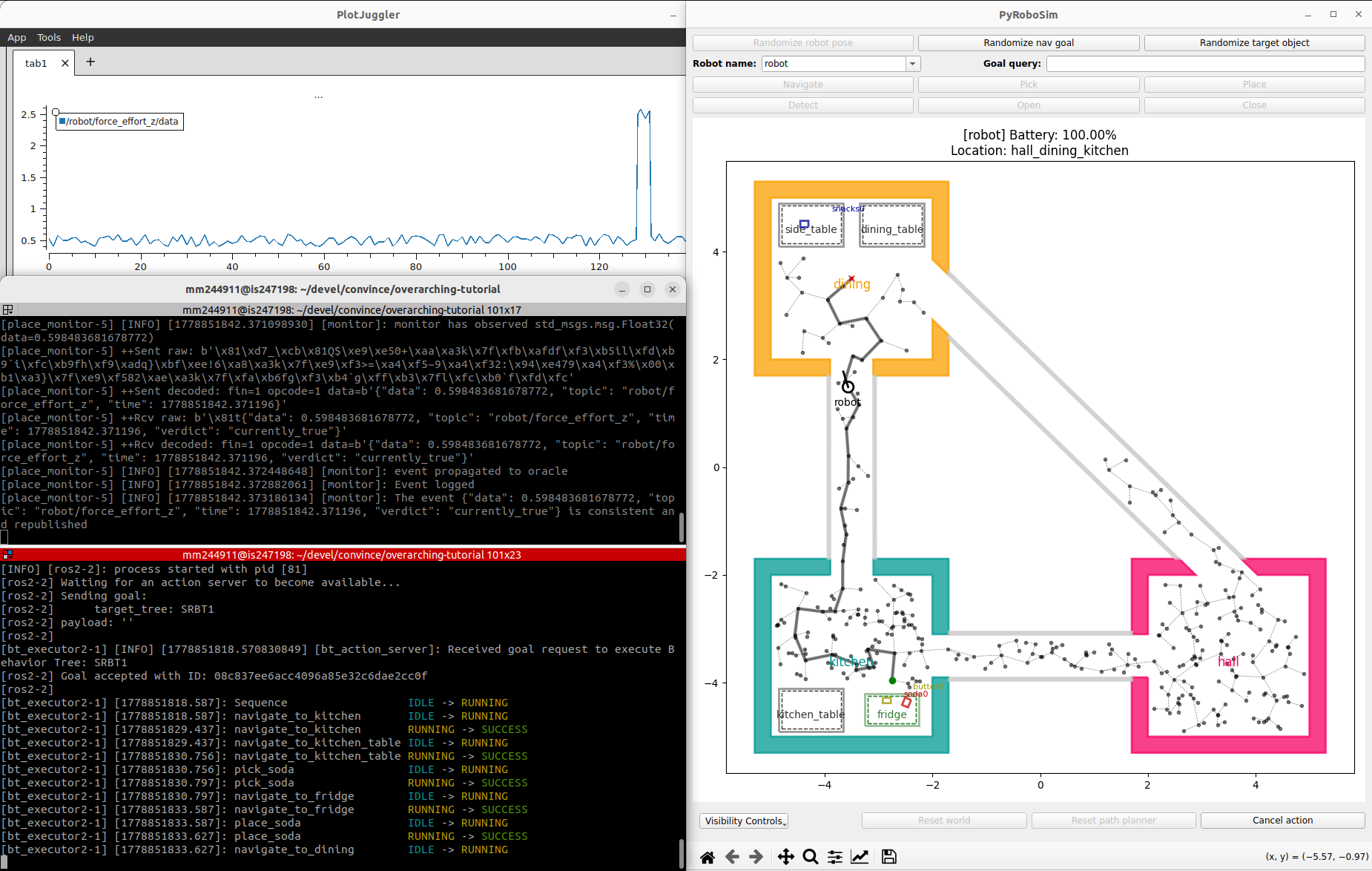
This failing second part of the robot’s mission can be run with:
docker compose run --rm base ros2 launch semantic_reasoning_bringup policy_executor.launch.py target_tree:=SRBT2
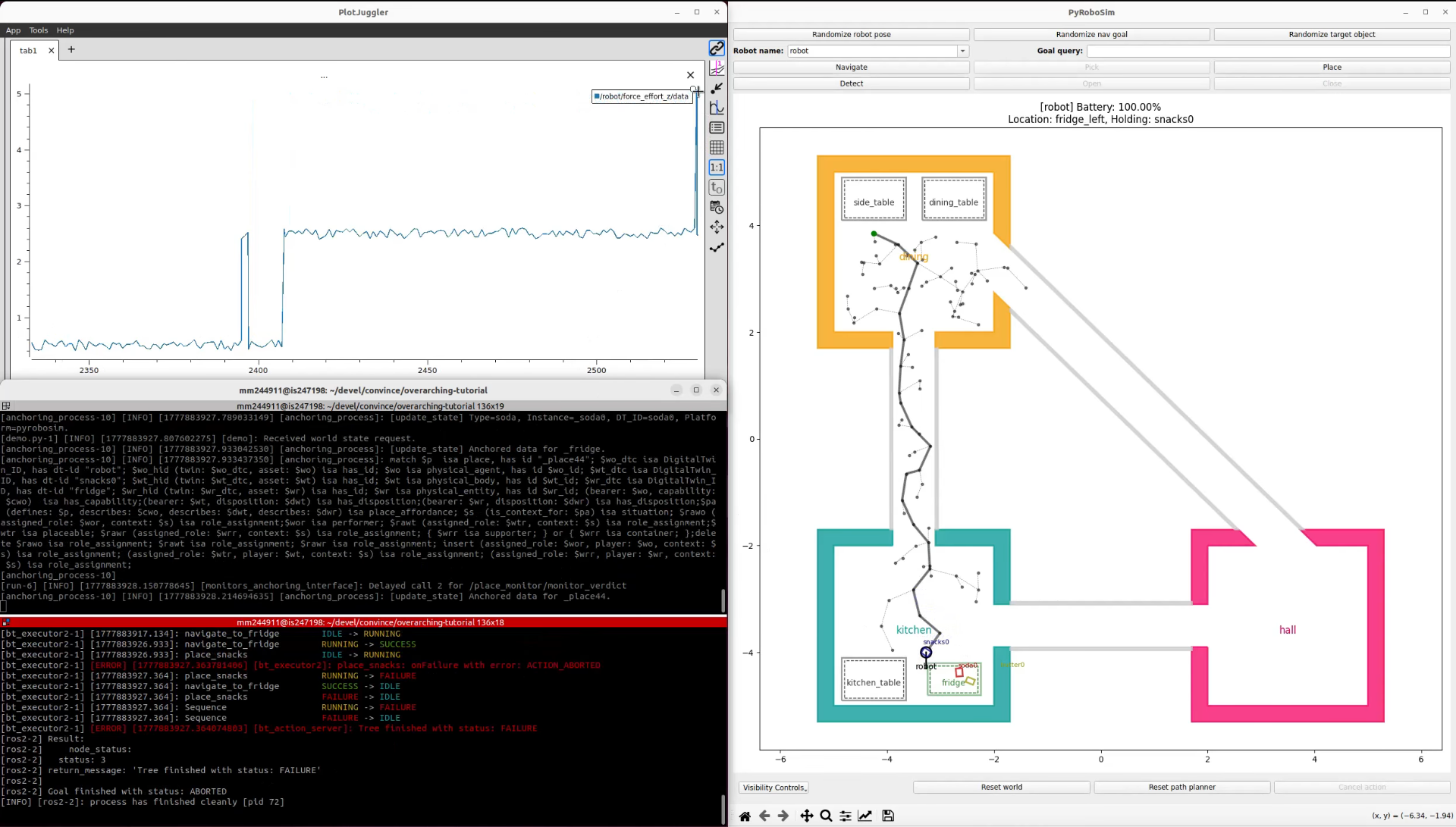
Note how, due to the collision with the fridge’s borders, the effort at the robot’s end-effector tip rises above the property threshold. MOON’s place monitor detects the property violation, and the anchoring’s knowledge update process is activated (visible in the console).
Robot Knowledge Inspection
The execution of the anchoring’s knowledge update process causes a series of interactions between /anchoring_process and the digital twins that are transparent to the user. The properties of ontology individuals are updated and inference rules are applied. The figure below illustrates how the application of inference rules (reasoning) deduces the cause of the non-manifestation of the place affordance for the robot’s place task. All the inferred knowledge is outlined in green.
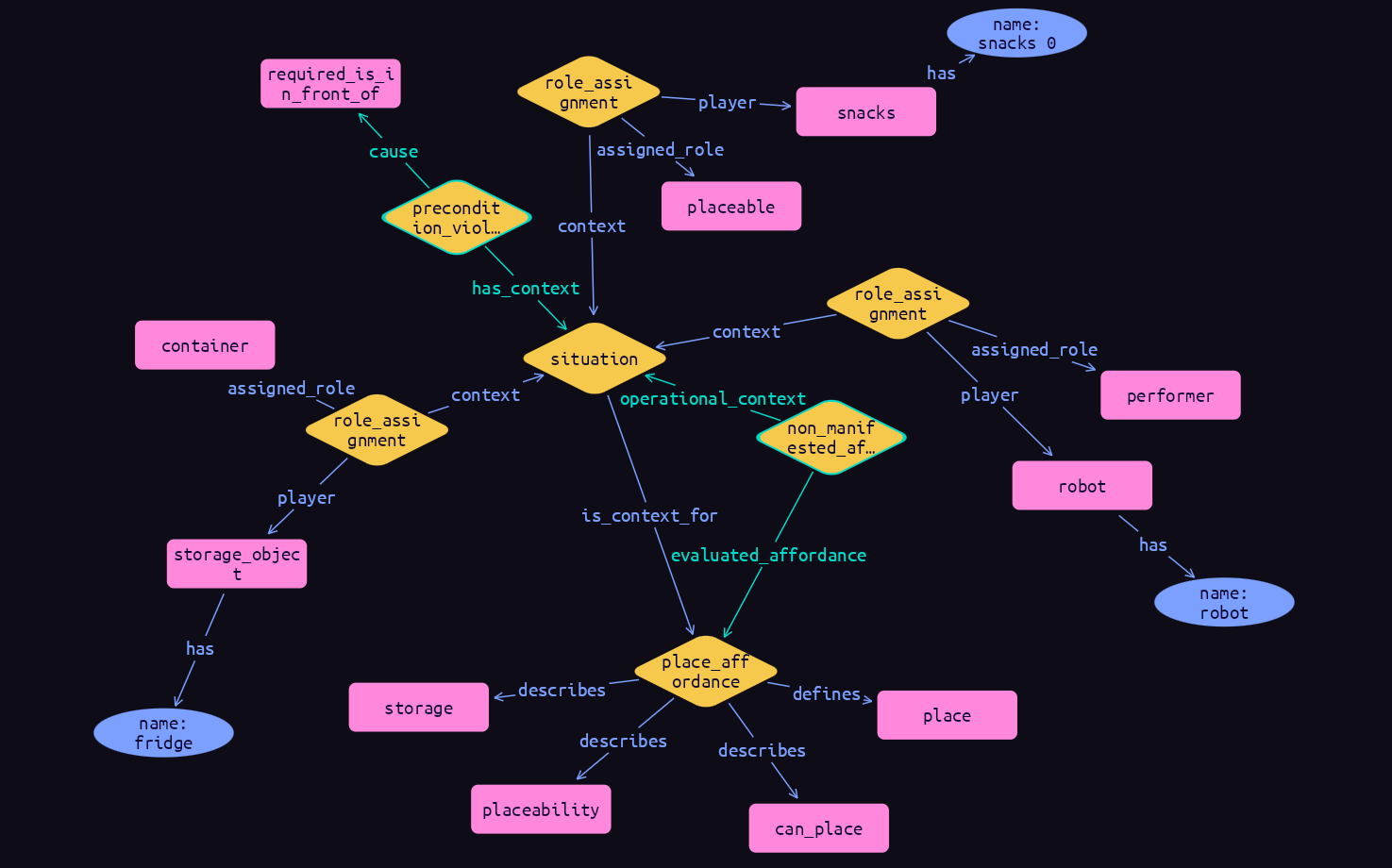
situation is the central concept that represents the task execution. It serves as the context for a place_affordance, which defines a place task involving three participants: the performer of the action – the robot, which possesses the can_place capability; the placeable entity – the snacks held by the robot, which has the placeability disposition; and the container – the fridge, which has the storage disposition (the target where the snacks is to be placed).
The situation acts as the operational_context for the non-manifested place affordance. The cause of the non-manifestation is the absence of the is_in_front_of relation between the performer and the container (required_is_in_front_of), indicating that the robot is not in front of the fridge.
The snapshot of the robot’s internal knowledge in the above figure is obtained with the following query in TypeDB Studio:
match
$nmpa (evaluated_affordance: $pa, operational_context: $sit) isa non_manifested_affordance;
$pa (describes: $cwo, describes: $dwt, describes: $dwr) isa place_affordance;
(has_context: $sit, cause: $cause) isa precondition_violation;
(assigned_role: $ar, player: $p, context: $s) isa role_assignment;
$p isa physical_entity, has name $pn;
get;
Mitigation Action
We assume that the previously described undesired system state corresponds to a known anomaly for which a predefined mitigation action exists. The mitigation strategy involves commanding the robot to move away from the fridge, perform a brief navigational loop in the kitchen, and then return to attempt correct positioning.
To simulate the successful application of this mitigation strategy, we first remove the injected spurious navigation bug before the robot executes the action to navigate away from the fridge. This is achieved using the following command:
docker compose run --rm base ros2 service call /robot/inject/spurious_navigation_bug std_srvs/srv/SetBool "{data: false}"
The successful final phase of the robot’s mission can then be executed with:
docker compose run --rm base ros2 launch semantic_reasoning_bringup policy_executor.launch.py target_tree:=SRBT3
In this case, MOON does not activate the anchoring’s knowledge update process because the monitored property is not violated. But we can be manually trigger it using the following command:
docker compose run --rm base ros2 action send_goal /anchoring_process/update_state anchoring_process_interfaces/action/UpdateState "{knowledge_domain: 'SkrawlMoMa'}"
After executing the above query, the result will be empty, indicating that there are no longer any non-manifested place affordances in the system:
## Result> Get query did not match any concepts in the database.
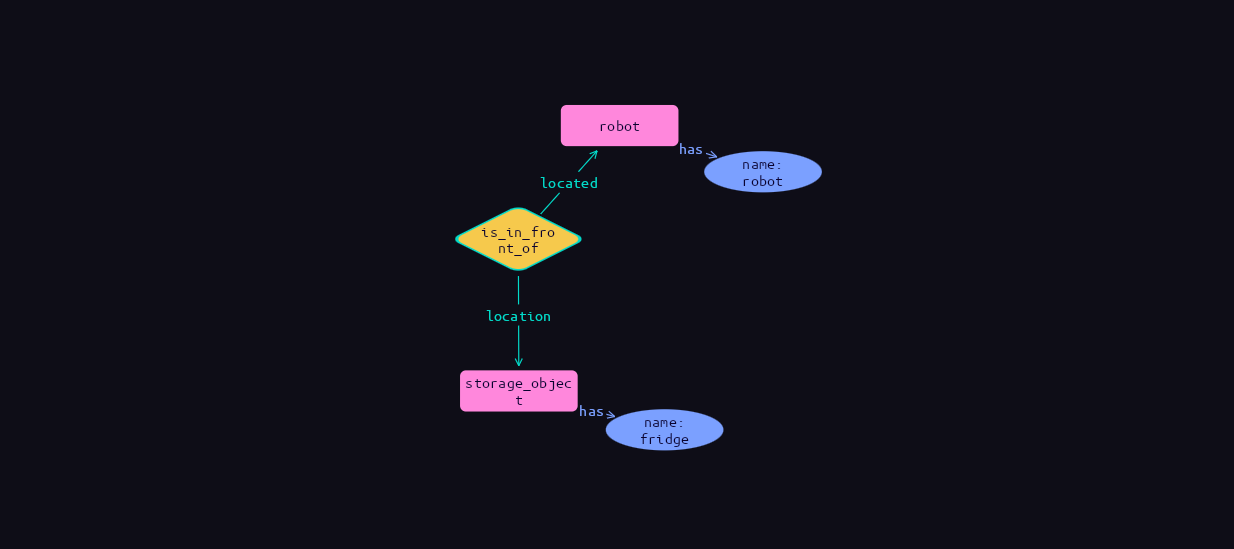
Conversely, and as expected, querying the system now confirms that the robot is correctly positioned in front of the fridge:
match
$f (located: $a, location: $p) isa is_in_front_of;
$a isa artificial_agent, has name $an;
$p isa physical_entity, has name $pn;
get;
Further Information
For more information, you can:
Visit our official documentation
Look at the source code
Look at the ontology