CONVINCE Toolbox Overview
Welcome to the CONVINCE toolbox documentation. The goal of the CONVINCE project is to provide an open source toolbox to improve robust robot deliberation with the help of planning, learning, and model checking techniques.
This is the entry-point for the CONVINCE toolbox documentation. It provides an overview of all the individual components which are part of the large toolbox. Those components can be used standalone and also linked together as required for individual use cases.
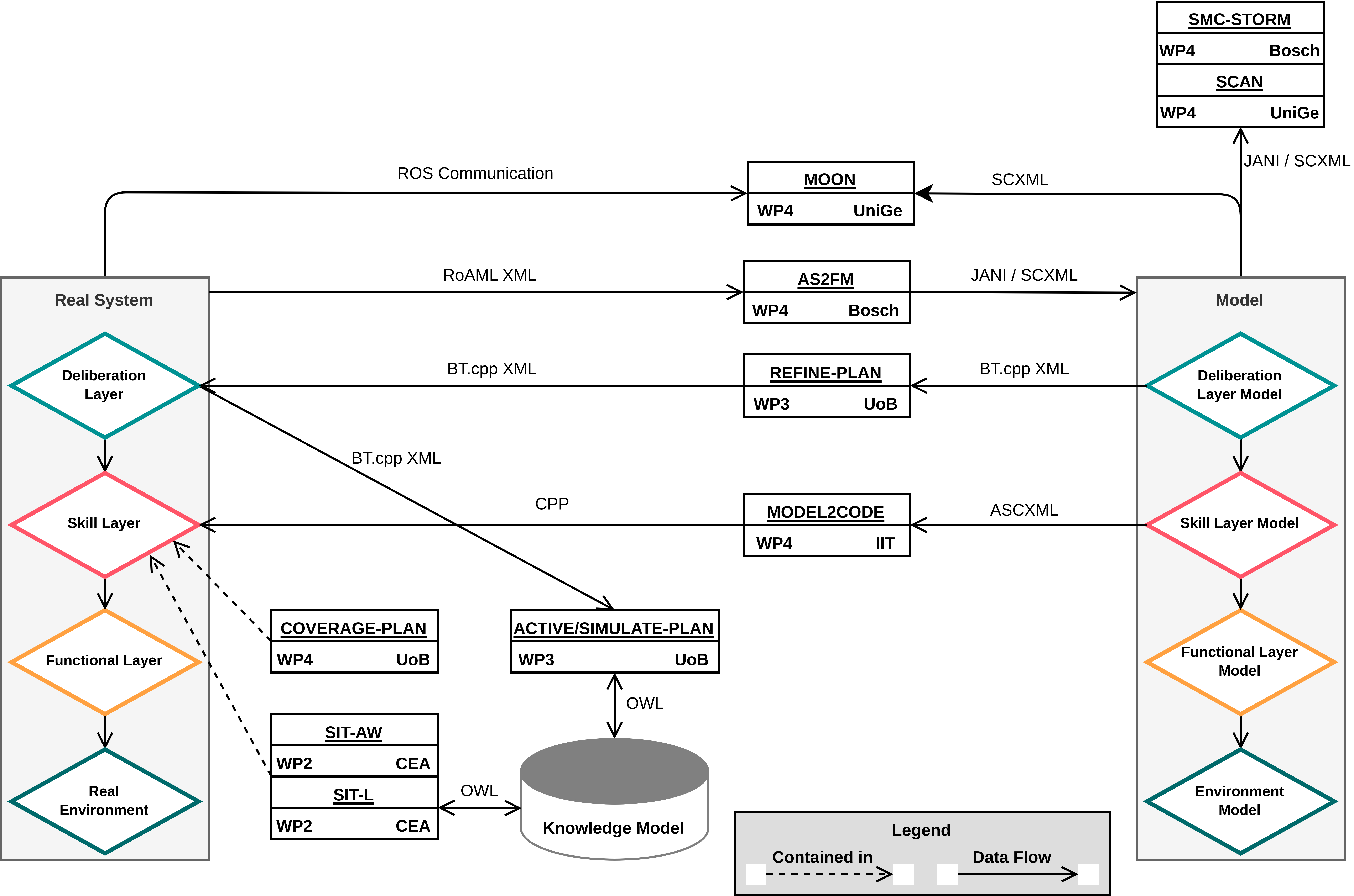
The CONVINCE toolbox works as depicted above. The individual repos and documentations are linked from there.
In the following the CONVINCE toolbox components are briefly described. For more details please check out the individual repositories with their documentation and tutorial pages.
sit-aw
SIT-AW is a software pipeline for robot situation awareness. It enables known and unknown anomaly detection, identification and resolution.
By the end of CONVINCE the pipeline will be made up of different software modules implementing approaches based on symbolic AI and deep learning. During robotic system operations, these modules will handle the detection and classification of unexpected situations (anomalies). Symbolic approaches rely on a knowledge base constituted by an ontology and its rules. Deep learning approaches rely on data collection, feature extraction and data fusion to be able to identify an anomaly as being known or unknown. The pipeline takes monitor alarms and sensory-data as inputs. Whenever an anomaly is classified as unknown, SIT-AW interacts with ACTIVE-PLAN to try to come up with an appropriate mitigation plan. This mitigation plan will be used in SIT-L for learning new situations models.
For a list of available software modules in the current release of the SIT-AW pipeline refer to its README file.
sit-l
SIT-L is a software module that implements techniques for the acquisition (learning) of new episodic and semantic memory from encountered unexpected situations that were not foreseen at design time (unknown anomalies). It closes the loop of robot situation awareness and increased robot autonomy.
SIT-L represents the extraction of the new anomaly description, given the preprocessed sensory-data, monitor outputs, ontologies and from the found solution to resolve the anomaly, i.e., the output of ACTIVE-PLAN/SIMULATE-PLAN. A new pair (anomaly description, mitigation strategy) is then added to the current knowledge base, which implies learning a new situation. Indeed, if the system encounters this situation again, it will be able to identify the anomaly as known and resolve it.
coverage-plan
The CONVINCE toolbox contains two versions of COVERAGE-PLAN.
COVERAGE-PLAN V1
COVERAGE-PLAN V1 is an online tool for lifelong area coverage in dynamic and uncertain environments.
COVERAGE-PLAN V1 operates on discrete grid environments. COVERAGE-PLAN V1 has two components: an online coverage planner, and a learned model of stochastic occupancy dynamics. The dynamics model captures the probability that a grid cell becomes occupied or free in the next timestep. This model is learned over the robot’s lifespan, where the model is updated after each coverage run using the robot’s latest observations. The online coverage planner uses the learned model to build and solve a partially observable Markov decision process (POMDP) for area coverage. The state-of-the-art DESPOT algorithm is used to solve POMDPs. Before deployment, the user must specify the map dimensions, the robot’s starting position, the robot’s field of view, and the time bound on coverage.
COVERAGE-PLAN V1 can be found here and its documentation can be found here. The documentation contains a tutorial demonstrating the coverage planner.
COVERAGE-PLAN V2
COVERAGE-PLAN V2 is an online tool for tour planning in crowded, human-populated environments.
COVERAGE-PLAN V2 operates over a topological graph. COVERAGE-PLAN V2 has two components: an online tour planner, and a learned model of human dynamics. The dynamics model, known as a CLiFF map, captures the speed and direction of human motion at different points in the environment. This model is learned from human motion data collected on LIDARs placed around the environment. The online tour planner uses the CLiFF map to build and solve an MDP. The MDP is solved using labeled real-time dynamic programming (LRTDP). Before deployment, the user must specify the topological map and the robot’s starting position.
COVERAGE-PLAN V2 can be found here and its documentation can be found here. The documentation contains a tutorial showing how to use the tour planner.
refine-plan
REFINE-PLAN is an offline tool for refining hand-designed behaviour trees (BTs) to admit geometric reasoning and attain robustness under uncertainty, improving performance.
The input to REFINE-PLAN is a hand-designed BT. REFINE-PLAN extracts a state space from the hand-designed BT, and learns the probabilistic dynamics of BT action nodes under different parameters. These parameters describe the motion-level behaviour of action nodes. To support model learning, we use an information-theoretic approach to efficiently collect data in simulation. The simulation is provided by the user. State space extraction is not implemented in the current release. Given the extracted state space and a set of Bayesian networks that describe robot dynamics, REFINE-PLAN constructs an MDP and solves it using Storm/Stormpy to synthesise a policy. This policy can then be converted back to a BT using existing methods.
REFINE-PLAN can be found here and its documentation can be found here. The documentation contains a number of tutorials demonstrating the current functionality.
active/simulate-plan
convince-project/active-simulate-plan
ACTIVE/SIMULATE-PLAN is a suite of online tools for handling unknown anomalies.
The input to ACTIVE/SIMULATE-PLAN is the current state information and a list of available actions in JSON format. The output is a plan also in JSON format. Anomalies are detected using SIT-AW. The ACTIVE-PLAN component handles anomaly identification by applying causal interventions with Monte Carlo Tree Search (MCTS) to run “what-if” analyses. The SIMULATE-PLAN component handles anomaly recovery using the information from ACTIVE-PLAN to plan and execute a sequence of actions that returns the system to a valid, goal-achievable state using Task and Motion Planning (TAMP).
ACTIVE-PLAN and SIMULATE-PLAN can be found here, and the documentation can be found here. We provide a tutorial showcasing our framework.
scan
SCAN (StatistiCal ANalyzer) is a statistical model checker developed to verify large concurrent systems for which standard verification techniques do not scale. The input model of SCAN is an asynchronous composition of state machines (FSMs) described using the SCXML (State Chart XML) format; properties are described using an XML syntax for pMTL (Past Metric Temporal Logic) interpreted over hybrid event/discrete time traces. SCAN translates the SCXML specification into a Channel System (CS) whose executions are sampled in order to find violations of the specified properties or establish that such properties are verified with some probability and within some confidence interval. The probability values and the size of the confidence intervals depend on the amount of time given to SCAN to verify the system: allowing more verification time will correspond to smaller confidence intervals. Also, if the model is probabilistic, then the final result of SCAN will depend on the probabilistic parameters of the model. In other words, if the model is just non-deterministic, the probability of satisfaction and corresponding confidence interval attached to a specific property by SCAN will only depend on the computation time allowed, whereas if probabilities are attached to transitions in the model, this will also influence the final result emitted by SCAN.
moon
MOON (MOnitoring ONline) is a runtime monitor developed for CONVINCE on top of the ROSMonitoring tool. MOON accepts the same description of SCAN and provides monitor generation for properties and models. Currently, only monitor generation for properties is implemented on top of ROSMonitoring, working for ROS2 topics and services. In perspective, the tool will include also monitoring for models, i.e., the capability of ensuring that the concrete execution of some elements of the control architecture or the environment correspond to the abstract model utilized at design-time for SCAN. MOON will notify violations of properties and models so that other tools can be invoked to amend plans or models and adapt the control architecture to new and unforeseen situations.
as2fm
This is a toolbox for converting all specifications of components of a robotic system under investigation into a format which can be given as input to model checkers for verifying the robustness of the system functionalities. The resulting format used for model checking is JANI.
The toolbox consist of a script to convert models describing the system and its environment together, given in the CONVINCE robotics JANI flavor as specified in the data model repository, into plain JANI accepted as input by model checkers. The second part of the toolbox centers around system specifications given in (SC)XML and how to convert them into a plain JANI file for model checking. This comprises property specification in temporal logic, currently given in JANI, a behavior tree in XML, ROS nodes and their plugins in SCXML, and an environment specification in SCXML.
model2code
This is a tool to generate skill level code starting from an SCXML model. Starting from an SCXML model, XML file that describes the full model of the program, which includes the behavior tree, the skills and the components used in the system, and an XML file that describes the interfaces used between behavior tree and skills, and between skills and components, the program generates an header file and a source file that contains the code of the skill level. The skills generated are based on a behavior tree structure and will have a ROS2 tick service in case they are a condition a ROS2 tick and halt services in case they are an action.
smc-storm
This is a statistical model checking engine for DTMC models given in JANI, which has been implemented as an extension to the famous Storm model checker. The tool and its documentation can be found in this repository.